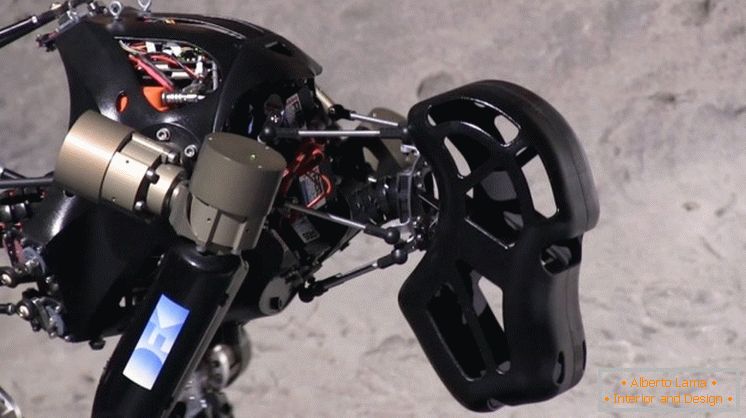
Nemački istraživački centar za veštačku inteligenciju (DFKI) i Univerzitet u Bremenu rade na simian robotu iStruct Demonstrator, klasifikovan je kao "vesoljski robot". Sada mehanički majmuni polažu testove za hodanje i ravnotežu u uslovima u blizini reljefa mjeseca.

Istraživanje opasnih lunarnih površina zahtijeva korištenje različitih oblika kretanja, a istraživači iz DFKI proučavaju svoje sposobnosti (uključujući kombinaciju nogu, točkova i gusenica). Majmunski roboti imaju određene prednosti u poređenju sa točkovima, podrška sa četiri tačke omogućava vam da kreirate stabilniju poziciju prilikom penjanja kroz prepreke ili brdski teren. Robot se može balansirati na zadnjim nogama kako bi oslobodio prednje krajeve kako bi izvršio bilo koju akciju.

Sa novim međunarodnim interesima u lunarnoj misiji, postoji mogućnost da iStruct (ili jedan od njegovih potomaka) bude u mogućnosti posjetiti mjesec. Kolonizacija Meseca od strane robota počinje razvojem koji se može razviti i razumno reagovati u bilo kojoj trenutnoj situaciji. U tom smislu, cilj projekta je izgradnja "napredne veštačke inteligencije" i robotskog sistema koji može da uči i krene naokolo.
Robot ima kičmenu kičmu koja povezuje prtljažnik i karlicu, što mu daje veću fleksibilnost, kao i senzor opterećenja stopala i gležnja koji reaguju kada su u kontaktu sa zemljom.
Ostale karakteristike uključuju:
- 43 nezavisnih motora;
- Šest dodatnih FSR senzora na otvorenim dijelovima koji se koriste za otkrivanje prepreka;
- 6-osni senzor momenta;
- Digitalni 3-osni akcelerometar, da percipiraju orijentaciju stopala u svemir;
- Dva temperaturna senzora za kompenzaciju promjena temperature u elektronici;
- Digitalni magnetni senzor za ugaonu kontrolu svake pokretne ose stopala i zglobnog zgloba;
Većina robota već sadrži mnoge od ovih senzora, ali artikulisana kičma iStruct (koja može da funkcioniše kao 6-osni pretvarač obrtnog momenta) je vrsta retkosti za lokomotorne robote koji pomažu u kretanju na sva četiri. Senzori u zglobovima nogu i zglobovima omogućit će mu da održi ravnotežu na nagnutoj površini.
U 2008. i 2009. godini diplomirani inženjer Daniel Kuhn radio je na sličnom robotu. Mali majmun koji je bio sposoban za jednostavno hodanje sa četiri noge. Nakon ovog projekta, počeo je raditi na iStruct-u, koji ima nekoliko značajnih ispravki. Ovo je mnogo veća težina, 18 kg i dimenzije 66 x 43 x 75 cm, a takođe sadrži 26 stepeni slobode i pogonjeni od strane različitih električnih motora. Projekat treba da bude završen u avgustu ove godine.
Možete videti kako koristi svoje intelektualne noge i zglobove prilikom hodanja i održavanja ravnoteže u video zapisu ispod. Ovo je mali korak za robot majmuna, ali potencijalno ogroman skok za sve robotike sličnog dizajna.
Šetnja
Balansiranje
Fotogalerija Ukupno | 14 slika














")